3D Lidar
Three dimensional LiDARs provide a pointcloud of all points detected by several planar scanners at various angles, which is published as a sensor_msgs/PointCloud2 message. It is important to accurately position the LiDAR in the visual descriptiuon of the robot to ensured that the scanned points are accurate with respect to the robot.
Ouster OS1
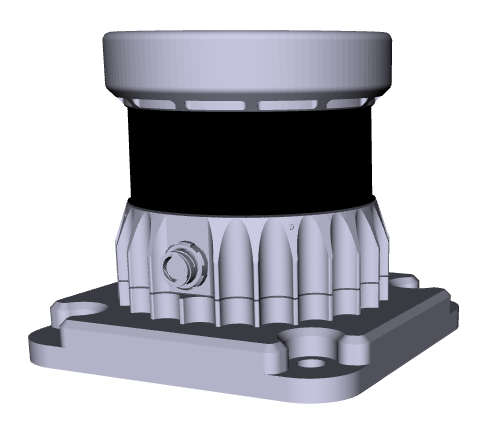 | |
Package and Setup
Ouster lidars use the ouster_ros driver. This is
an open-source driver, maintained by the manufacturer.
For more specifics on the way Clearpath's configuration system launches the ouster_ros nodes,
see the Ouster launch file
and the default parameter file
in clearpath_sensors.
Seyond Robin W
 | |
Mesh-Only Support
The Seyond Robin W is only supported as a mesh in robot.yaml; it is intended to be managed by Clearpath's
OutdoorNav software, which uses its own set of drivers and launch files that do not directly integrate with
the robot configuration yaml.
Velodyne Lidar
 | |
Package and Setup
The Velodyne LiDARs use the velodyne_driver ROS 2 Package. The driver is open source, maintained by the ROS community, and hosted on GitHub. Unlike other drivers, the visual description of the device is hosted in a separate repository. The description package, along with the simulator, is maintained by Dataspeed and hosted on BitBucket.
For more specifics on the way Clearpath's configuration system launches the velodyne_driver, see the Velodyne launch file and the default parameter file in clearpath_sensors.
Model
There are several types of Velodyne LiDAR. To switch between these, the model parameter must be set under the both the velodyne_driver_node and the velodyne_transform_node, and the calibration parameter must be set under the velodyne_transform_node.
| Name | Model | Calibration |
|---|---|---|
| Puck | "VLP16" | "VLP16db.yaml" |
| Puck Hi-Res | "VLP16" | "VLP16_hires_db.yaml" |
| Ultra Puck | "32C" | "VeloView-VLP-32C.yaml" |
| VLS-128 | "VLS128" | "VLS128.yaml" |
| HDL-32E | "32E" | "32db.yaml" |
| HDL-64E | "64E" | "64e_utexas.yaml" |
| HDL-64ES2 | "64E_S2" | "64e_s2.1-sztaki.yaml" |
| HDL-64ES3 | "64E_S3" | "64e_s3-xiesc.yaml" |
When setting the calibration parameter, prepend the path /opt/ros/jazzy/share/velodyne_pointcloud/params/ to the calibration file name in the table above.